 Nokia held a virtual awards ceremony on December 3 and announced the winners of the 2020 Bell Labs Prize, a competition that recognizes disruptive innovations that will define the next industrial revolution. Proposals were received from 208 academics in 26 countries, and a team from the Georgia Tech School of Electrical and Computer Engineering (ECE) consisting of GTPG member Cheng Qi, Francesco Amato, and Greg Durgin was presented with the third-place prize. Read more here.
Nokia held a virtual awards ceremony on December 3 and announced the winners of the 2020 Bell Labs Prize, a competition that recognizes disruptive innovations that will define the next industrial revolution. Proposals were received from 208 academics in 26 countries, and a team from the Georgia Tech School of Electrical and Computer Engineering (ECE) consisting of GTPG member Cheng Qi, Francesco Amato, and Greg Durgin was presented with the third-place prize. Read more here.
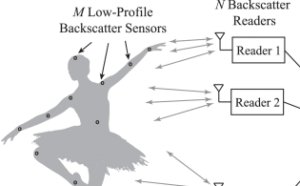
Motion Capture Through Walls, Long Distances
Fine-scale Through-Wall Positioning Using Tunneling RFID Tags
Cheng Qi;Francesco Amato;Billy Kihei;Gregory D. Durgin
2020 IEEE International Conference on RFID (RFID)
It has been shown that Tunneling Tags enable long-range communications and localization in line-of-sight (LoS) with an RFID reader operating in the 5.8 GHz band. This paper demonstrates how a received signal phase-based positioning method can be applied to localize tags in a non-line-of-sight (NLoS) scenario. In particular, a Tunneling Tag provides 20.0 dB more received signal strength than a Semi-passive one when they communicate through a plaster wall. Moreover, when calibration is applied, average distance estimation accuracies of 12.1 cm (percentage error: 2.1%) and 9.2 cm (percentage error: 1.4%) are achieved in LoS and NLoS, respectively. The low-power requirement of the Tunneling Tag and the low EIRP of the reader suggest that these tags can significantly contribute to developing new and low-powered indoor positioning applications.
How to Do Motion Capture with RFID Sensor Fusion
Nonlinear Least-Squares State Estimation for 2D RFID-Based Motion Capture
Qian Yang;David G. Taylor;Gregory D. Durgin
2020 IEEE International Conference on RFID (RFID)
In this paper, we present a general technique for implementing nonlinear least-squares state estimation for a two-dimensional RFID-based motion capture problem that can achieve 1.45 cm localization accuracy without the need for special initialization or tuning processes – a significant improvement over previous results in the literature. We demonstrate various algorithms that use different combinations of received signal strength (RSS), backscatter signal phase, a 3-axis accelerometer, a 3-axis gyrometer, and 3-axis magnetometer measured in a live microwave backscatter system. Permutations involving different nonlinear solvers (Gauss-Newton and Levenberg-Marquardt) and different stack levels (the number of samples in time incorporated into an estimation) are addressed.
Two-Dimensional, Ultra-Precise Localization
 Two-Dimensional Position and Orientation Estimation Using a 5.8 GHz RFID System
Two-Dimensional Position and Orientation Estimation Using a 5.8 GHz RFID System
Muhammad B. Akbar ; David G. Taylor ; Gregory D. Durgin
IEEE Journal of Radio Frequency Identification
Year: 2020 | Early Access Article | Publisher: IEEE

Precise estimation of object position and orientation using RF tags is an emerging application of RFID technology. In this work, we present a novel wireless two-dimensional position and orientation estimation and tracking technique that illustrates the concept of sensor fusion—using multiple, disparate sensor measurements to synthesize a single, superior estimate of position and orientation. The technique is implemented using a 5.8 GHz RFID system that consists of three readers and a customized tag equipped with a 3-axis accelerometer, 3-axis gyroscope and 3-axis magnetometer. Reader received signal strengths and packet-to-packet phase differences are used to measure radial tag positions and radial tag velocities, and backscattered data packets provide measurements of the tag’s linear accelerations, angular velocities and orientations. A hybrid inertial microwave reflectometry (HIMR) algorithm is used to produce motion-capture grade estimates of tag position and orientation; in experiments, a two-dimensional position accuracy of less than 13 mm was achieved. The HIMR algorithm is designed using physics-based modeling equations, modifications are proposed to accommodate temporary link loss, and observability analyses clarify the foundations of the estimator design method.
- 1
- 2
- 3
- …
- 6
- Next Page »