 Two-Dimensional Position and Orientation Estimation Using a 5.8 GHz RFID System
Two-Dimensional Position and Orientation Estimation Using a 5.8 GHz RFID System
Muhammad B. Akbar ; David G. Taylor ; Gregory D. Durgin
IEEE Journal of Radio Frequency Identification
Year: 2020 | Early Access Article | Publisher: IEEE

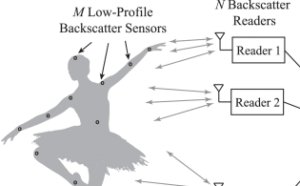
Precise estimation of object position and orientation using RF tags is an emerging application of RFID technology. In this work, we present a novel wireless two-dimensional position and orientation estimation and tracking technique that illustrates the concept of sensor fusion—using multiple, disparate sensor measurements to synthesize a single, superior estimate of position and orientation. The technique is implemented using a 5.8 GHz RFID system that consists of three readers and a customized tag equipped with a 3-axis accelerometer, 3-axis gyroscope and 3-axis magnetometer. Reader received signal strengths and packet-to-packet phase differences are used to measure radial tag positions and radial tag velocities, and backscattered data packets provide measurements of the tag’s linear accelerations, angular velocities and orientations. A hybrid inertial microwave reflectometry (HIMR) algorithm is used to produce motion-capture grade estimates of tag position and orientation; in experiments, a two-dimensional position accuracy of less than 13 mm was achieved. The HIMR algorithm is designed using physics-based modeling equations, modifications are proposed to accommodate temporary link loss, and observability analyses clarify the foundations of the estimator design method.